智能修井配套井下电动工具及关键技术
智能修井配套井下电动工具及关键技术
01成果简介
随着井下作业向电动化、智能化方向发展,传统修井工具因过度依赖人工操作、流程复杂、效率低下等问题,难以满足可视、精准、高效的作业需求。因此,发展可视可控修井工艺,研制井下电动智能工具,成为当前油气田挖潜增效的关键技术需求,也是提升修井作业安全性与可靠性的重要基础。针对这一需求,课题组聚焦老井挖潜领域,创新性地提出了“电驱可视模块化短节-多场景作业可靠性分析-智能修井决策系统”三位一体的可视主动干预智能修井技术体系,旨在为智能修井的发展提供重要支撑。具体研究成果如下:
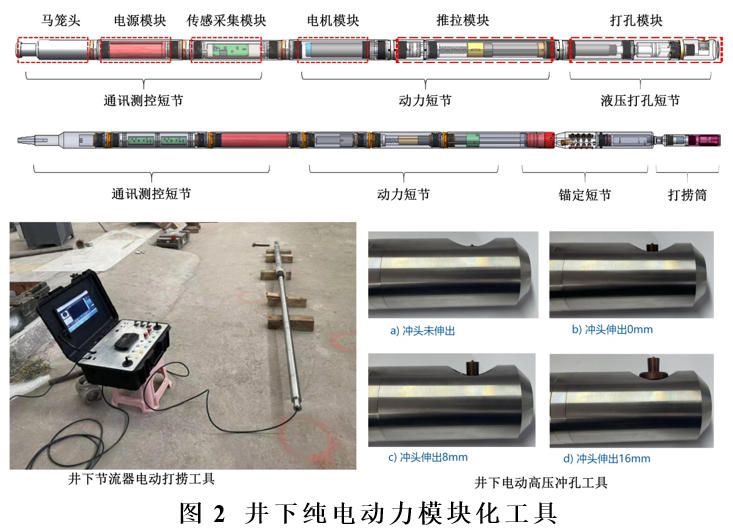
(1)电驱可视模块化短节设计。研发了增力拉拔通用动力短节、液压锚定短节、传感可视短节以及模块化工具头短节,构建了完整的井下电动化作业工具短节系统。创新设计了电驱高效率重载丝杠螺母轴向动力机构,并开发了适用于2-3/8″、2-7/8″、3″等不同管径的系列通用动力短节。通过有限元仿真优化锚爪结构,系统分析了不同尺寸、倾角、齿距及弧面对套管损伤的影响,形成了变距排列矩阵分布式锚爪结构形式。构建了基于传感器的虚拟可视和基于井下电视的实时可视的双重可视方式。开发了涵盖打捞、冲孔、切割、坐封等功能的模块化工具头,实现一机多能,提升作业适应性。
(2)多场景作业可靠性分析。针对打捞、冲孔、切割、坐封等工况,通过有限元模拟仿真,研究了受限空间重载下电动工具的力学性能。建立了关键零部件的“应力-疲劳-失效”模型,绘制了脆弱点转移图谱,为工具优化提供理论支撑。通过多工况可靠性分析,确保工具在复杂井下环境中的稳定性和耐久性。
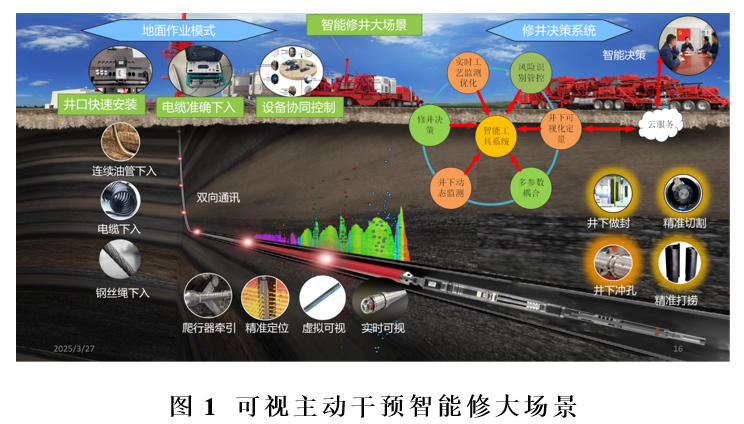
(3)智能修井决策系统。形成了基于QT框架的地面人机交互数字孪生系统,利用信号与槽机制,实现作业数据的采集、处理、存储、虚拟可视化、井下电视实时可视展示,并支持井下设备的远程精准控制。制定了上行(数据采集)与下行(指令传输)通信标准,提升数据传输的稳定性和抗干扰能力。
(4)典型井下电动工具研制。课题组重点针对疑难节流器打捞和高钢级油套管冲孔两大场景,研制了井下节流器电动打捞工具与井下电动高压冲孔工具,已成功开展了实验与应用验证,显著提升了修井作业的效率和安全性。
截至目前,该研究已获软件著作权1项,申请国家发明专利2项,申请国际专利1项。
02应用领域
本成果可以应用于高温高压井的“打捞、冲孔、切割、坐封”等修井作业中,可以有效推动国内智能修井作业的规模化发展。该可视干预智能修井技术以“电驱可控-模块重组-实时可视-智能决策”为核心,通过连续油管、钢丝绳、钻柱下入工具串,显著提升了井下作业的可靠性与安全性。而智能修井决策系统作为“大脑”,通过数据融合与远程控制实现了“井况可视、操作可调、风险可控”的闭环管理。典型应用领域场景如下:
(1)井下疑难节流器电动打捞场景
成果可以用于高温高压井的疑难节流器打捞,井下节流器打捞工具的电驱系统可调节打捞力度,避免因暴力操作损伤井筒或工具,模块化设计适配多种节流器类型打捞筒(如固定式、可调式),相比传统钢丝绳打捞,井下电动工具打捞力可提升1倍,作业时间缩短30%-50%,有效解决复杂疑难节流器打捞难题。
(2)井下电动冲孔场景
成果可以在砂堵或蜡堵的油气井的油管上进行打孔以重新建立油套循环,实现正反洗井将堵塞物从油管内冲出,为后续修井作业提供保障。该油管冲孔工具通过电机、减速器输出大扭矩,再利用特制的高强度、高传递效率的丝杠螺母机构把旋转运动变为直线运动,从而带动增力缸驱动冲头对油管进行打孔。此外,结合井下牵引器,这种电动液压冲孔方法同样适用于大斜度井和水平井的油管打孔作业,应用更加广泛。
03市场前景
作为油气资源开采领域的前沿技术,井下电动工具驱动的智能修井系统正迎来全球性发展机遇。井下电动工具与智能修井决策技术相融合,可以多方位协同,全面检测修井作业实时情况,形成一体化井下智能修井作业大场景,具备极强的市场应用前景,以满足油气井规模不断扩大和产量不断增加的市场需求。
04知识产权(必填,若暂无专利证书等证明材料,可填写:中国石油大学(北京)具有自主知识产权/已申请发明专利和软件著作权...)
已授权软著1项,申请发明专利2项、国际专利1项,获2024年度人工智能十大优秀案例。
05合作方式
合作开发、技术服务和咨询、技术许可。
06成果完成人(团队)

王文明,河北肃宁人,副教授,博士生导师,2014年获中国石油大学(北京)优秀教师称号,2018-2019年英国克兰菲尔德大学访学一年。长期从事海洋管柱力学、井下电动工具、装备级数字孪生等方向的研究。主持国家自然科学基金、教育部博士点基金、中国石油科技创新基金等省部级基金,参与完成国家重大专项、国家“863”、国防型号项目、地方及企业委托的各类科研项目30余项,取得了良好的研究成果。发表科研论文50余篇,其中SCI/ EI收录论文20余篇。申请专利20余项,其中授权发明专利18项。
