顶驱
顶驱
顶驱系统(Top Drive Drilling System, TDDS)作为石油钻井工程领域的重大技术突破,自20世纪80年代商业化应用以来,已从根本上改变了传统转盘钻井的作业模式。传统旋转钻井作业中,地面扭矩的传递依赖于转盘(Rotary Table)驱动方钻杆旋转,进而带动整个钻柱(Drill String)转动。这一经典模式在石油工业中长期占据主导地位,但其固有的局限性,如接单根(Making a Connection)过程中需停止循环、方钻杆有效长度限制、井口操作效率低下等问题,在深井、大位移井及复杂地层钻进中日渐凸显。顶驱装置的诞生本质上是对这一传统逻辑的颠覆:将动力水龙头与旋转驱动机构合二为一,悬挂于钻机游动系统(Traveling Block)下方,直接驱动钻柱旋转。这一构型重构不仅保留了常规水龙头的循环功能,更赋予了钻柱连续旋转与上下活动的双重自由度。

1.顶驱系统的工作原理
顶驱的核心工作逻辑可概括为:动力源(电动机或液压马达)通过减速机构输出大扭矩,经主轴传递至钻柱顶端,同时主轴内部设有循环通道,钻井液经由鹅颈管、主轴中心孔进入钻柱内腔。由此实现“边旋转、边循环、边起下”的协同作业能力。从力学角度看,顶驱将转盘施加于钻柱底部的扭转力矩移至顶部,改变了钻柱的受力分布状态。在传统转盘驱动中,钻柱承受自下而上的扭转波传递,长距离传递导致的扭转滞后与振动问题难以回避;而顶驱直接驱动钻柱顶端,扭矩传递路径短、响应快,有利于抑制扭转振动。

2.关键结构组成
一套完整的顶驱系统通常包含以下功能模块:
(1)主体总成
包括主电机、减速箱、主轴及轴承系统。主电机一般为交流变频电机,具备大功率(300 kW至1500 kW以上)与宽调速范围特性。减速箱采用行星齿轮或多级齿轮结构,实现低速大扭矩输出,典型顶驱的最大扭矩可达50 kN·m以上。
(2)钻井液循环系统
由鹅颈管、旋转密封总成、中心管及旁通阀组成。鹅颈管固定于顶驱壳体,通过高压软管连接立管(Standpipe);旋转密封总成承担动态密封任务,需在高转速、高压(35 MPa以上)及含固相颗粒的钻井液环境中保持可靠密封。
(3)导向与防扭系统
顶驱本体沿钻机井架内的导轨(Guide Track)上下运动,导轨同时承受顶驱工作时的反扭矩。防扭梁(Torque Reaction Arm)或防扭链条将反扭矩传递至井架结构,防止壳体旋转。
(4)管具处理系统
包括背钳(Back-up Wrench)、吊环倾斜机构(Link Tilt)及旋转头(IBOP, Inside Blow Out Preventer)。背钳用于上卸扣时夹持钻柱,防止主轴旋转;吊环倾斜功能允许操作者远程调整吊环倾角,实现单根钻具的自动抓取与对扣,极大提升接单根效率。
(5)控制系统
采用PLC与变频驱动(VFD)架构,集成扭矩监测、转速闭环控制、过载保护及数据记录功能。现代顶驱系统普遍配备远程操作站及无线遥控装置,司钻可在钻台面或司钻房内完成全部操作。
3.工程技术优势
3.1 接单根效率的提升
在转盘钻井中,每钻进一个单根(约9.5米至11米)的长度后,必须停止旋转、停止循环,将方钻杆提至转盘以上,卸下方钻杆与钻柱的连接,接入新的钻杆单根,再重新下放方钻杆、恢复循环与旋转。这一过程耗时约3至5分钟,且在复杂工况下风险较高。顶驱则允许在不停泵、不停转的条件下完成接单根:当钻柱钻进至单根长度后,上提顶驱至足够高度,背钳锁定钻柱,主轴反转卸扣,顶驱与钻柱分离;随后吊环倾斜抓取立根盒中的新单根,对扣、旋扣、上紧,整个过程循环不中断。接单根时间可缩短至1分钟左右,在深井作业中累计节省的非生产时间相当可观。
3.2 井控与复杂处理能力
传统转盘钻井在起下钻过程中,若发生井涌(Kick),需要立即接方钻杆建立循环——这一操作在高压力背景下极具风险。顶驱允许在任何起钻位置随时接上钻具并建立循环,应急响应时间大幅缩短。此外,顶驱具备低速大扭矩的“划眼”(Reaming)与“倒划眼”(Back Reaming)能力。在缩径、键槽等井眼不规则段,顶驱可以一边上提钻柱一边正向旋转,主动修整井壁;在遇卡时则可实施倒划眼,旋转上提解卡。
3.3 改善钻柱力学行为
从钻井工程力学的角度分析,顶驱驱动改变了钻柱的扭转振动特性。转盘驱动时,整个钻柱系统可视为一个长轴系,其扭转固有频率较低,当钻头与地层相互作用产生的扭矩波动接近该频率时,极易诱发剧烈的粘滑振动,导致钻头损坏、钻柱疲劳乃至井下工具失效。顶驱驱动由于扭矩施加点位于顶部,系统等效扭转刚度显著提高,加之现代顶驱配备的主动扭矩控制算法,如Soft Torque或类似的抗粘滑程序,能够实时监测并主动调节输出扭矩,有效抑制扭转振动。
3.4 作业安全性的提升
顶驱取消了方钻杆、转盘及方补心等地面旋转件,消除了方钻杆甩动造成的人员伤害风险。吊环倾斜、远程操作、液压背钳等功能使井口操作人员远离旋转危险区域。据统计,采用顶驱系统后,钻台面的人身伤害事故率降低约50%以上。
4.典型应用场景与选型
4.1 适用井型
顶驱并非适用于所有钻井场景,但从工程经济角度分析,以下井型中其优势最为突出:
(1) 深井与超深井(井深>4500米):接单根次数多,起下钻频繁,顶驱的效率优势随井深增加而放大。
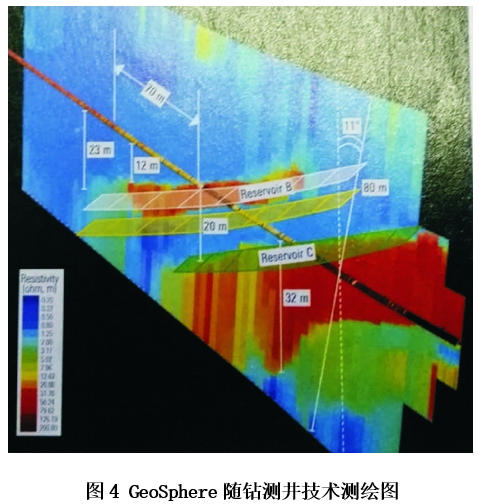
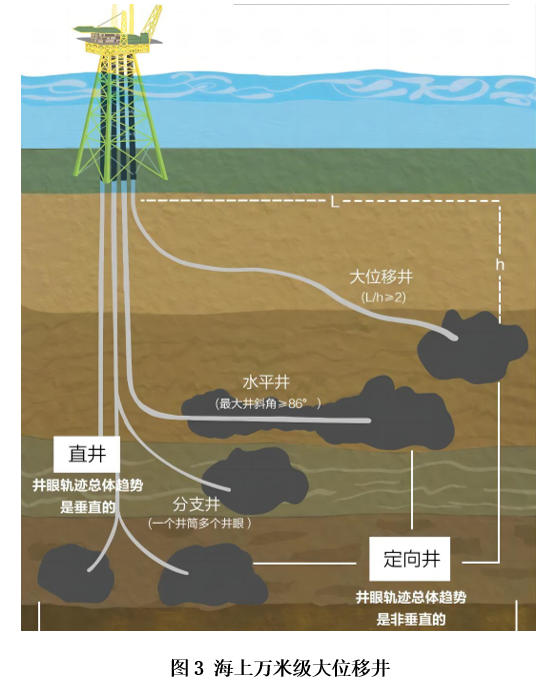
(2) 大位移井与水平井:摩阻扭矩大,需要大扭矩驱动且频繁进行倒划眼、划眼操作。
(3) 复杂地层钻井:如盐膏层、破碎带、软硬交错地层,需要随时调整转速与扭矩并具备快速响应能力。
(4) 海上钻井:平台日费极高,顶驱带来的时效提升直接转化为巨大经济效益,且海上作业对井控安全性要求苛刻。
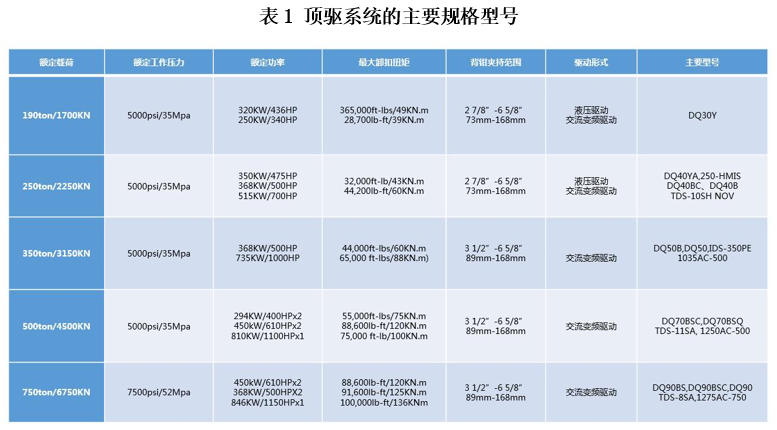
4.2 选型主要参数
现场选型需重点评估以下技术参数:
(1) 额定扭矩与最大扭矩:须覆盖目标区块的最大钻进扭矩需求,并留有一定过载余量。通常按预计最大扭矩的1.3倍选取。
(2) 连续工作扭矩:对应设计井段中常规钻进所需的持续输出能力,需考虑电机散热与减速箱油温控制。
(3) 通径(主轴内径):决定可通过的最大钻头水眼、随钻测量工具外径及打捞落鱼尺寸。深井大位移井建议通径不小于3英寸(76.2 mm)。
(4) 最大提升载荷:顶驱自身重量加上悬挂钻具的载荷,须与钻机游车大钩额定载荷匹配。
(5) 环境适应性:极寒地区需配备低温套件(加热、保温);沙漠地区需加强防尘散热;海上需满足防爆与防腐要求。
4.3 现场运维要点
根据现场经验,顶驱系统的高故障率部件集中在三处:旋转密封总成、背钳机构与导轨滑块。
(1) 旋转密封的失效往往表现为钻井液泄漏,早期征兆包括密封箱体温度异常升高、泄漏孔有少量泥浆渗出。建议每500小时检查密封磨损量,每2000小时或每次完钻后更换密封件。
(2) 背钳卡瓦的齿面磨损是导致上卸扣打滑的主要原因。现场应建立卡瓦齿高检测制度,当齿高磨损超过1/3时即需更换。背钳的液压同步性需定期标定,防止单侧受力导致钻杆螺纹损伤。
(3) 导轨与滑块的间隙控制常被忽视。间隙过大会引起顶驱运行中的晃动,加剧主轴弯曲应力;间隙过小则造成摩擦阻力增大、导轨磨损。合理间隙应控制在0.5 mm至1.5 mm范围内,每口井完钻后需测量并调整。
5.技术局限与应对策略
尽管顶驱优势显著,但其应用也存在固有局限。首先,顶驱系统自重较大,在15吨至40吨不等,增加了钻机井架与底座的承载负担,对于老旧钻机可能需要结构加强改造。其次,初始购置成本远高于转盘系统,一台进口顶驱价格通常在50万至150万美元之间,国产顶驱相对经济但核心技术仍有差距。再次,顶驱增加了设备的复杂性与维护深度,现场需配备专职维修人员及专用检测工具。针对上述局限,实践中可行的应对方案包括:对于改造项目,可选用轻量化顶驱,如单体重量<12吨的小型顶驱;经济性方面可考虑租赁模式或购置国产成熟型号;人员培训方面,建议建立顶驱模拟器训练制度,使操作与维修人员在上岗前完成系统化培训 。
6.技术发展趋势
当前顶驱技术正朝三个方向发展:
(1) 智能化:集成井下数据,如MWD/LWD实时扭矩、井底钻压与地面参数,通过边缘计算实现钻进参数的自动寻优。部分新一代顶驱已具备自动防粘滑、自动防泵压冲击等功能。
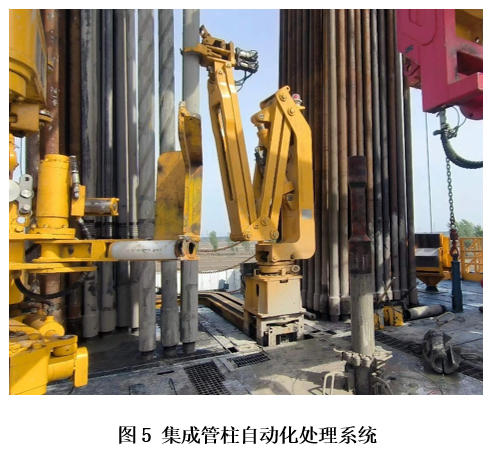
(2) 集成化:将顶驱与铁钻工、钻柱升沉补偿装置、自动猫道等系统联动,形成管柱自动化处理中心,向全自动钻机迈进。
(3) 电动化与永磁驱动:交流变频驱动已趋成熟,永磁同步电机(PMSM)直驱或半直驱方案逐步进入工程验证阶段,其传动效率更高、体积更小、维护量更低。